Riccardo Roveri1, Lukas Rahmann1, Cengiz Öztireli2, Markus Gross1
1Department of Computer Science, ETH Zürich 2Disney Research Zürich
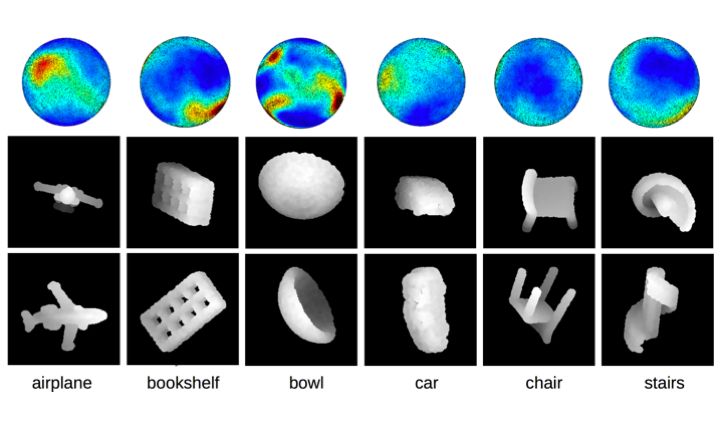
We propose a novel neural network architecture for point cloud classification. Our key idea is to automatically transform the 3D unordered input data into a set of useful 2D depth images, and classify them by exploiting well performing image classification CNNs. We present new differentiable module designs to generate depth images from a point cloud. These modules can be combined with any network architecture for processing point clouds. We utilize them in combination with state-of-the-art classification networks, and get results competitive with the state of the art in point cloud classification. Furthermore, our architecture automatically produces informative images representing the input point cloud, which could be used for further applications such as point cloud visualization.
Links:
PDF Project page Supplementary