Peter Quinn1, Jérôme Parent-Lévesque2, Cengiz Öztireli3, Derek Nowrouzezahrai1
1McGill University 2Mila, Université de Montréal 3University of Cambridge, Google
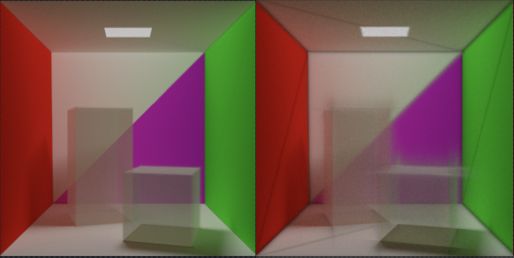
Recently, viewing computer vision as an inverse rendering problem has led to a growing interest in differentiable rendering. We introduce a novel differentiable path tracing algorithm where discontinuities in the rendering process are regularized through blurring of the geometry. Our differentiable renderer implements full global illumination and has parameters for controlling the regularization, which allows for some control over the smoothness of the loss landscape. We successfully apply our system to solve several examples of challenging inverse rendering optimization problems that involve more complex light transport scenarios that cannot be handled by rasterization-based differentiable renderers.
Links:
PDF